Pasos hacia vehículos que conduzcan solos: percepción

Ya hemos hablado en otras ocasiones por aquí de avances en algoritmos de conducción de vehículos autónomos (1,2) o incluso de avances legales. Pero la gran barrera a día de hoy está en la percepción: lo que nuestro cerebro hace en tiempo real a partir de lo que ven nuestros ojos es extremadamente complejo de igualar con un ordenador.
Más aún si queremos que los coches del futuro sigan conduciendo solos cuando haya niebla, llueva, o incluso cuando tengamos el sol de frente, situaciones que a día de hoy arruinan cualquier algoritmo por muy en el estado del arte que esté.
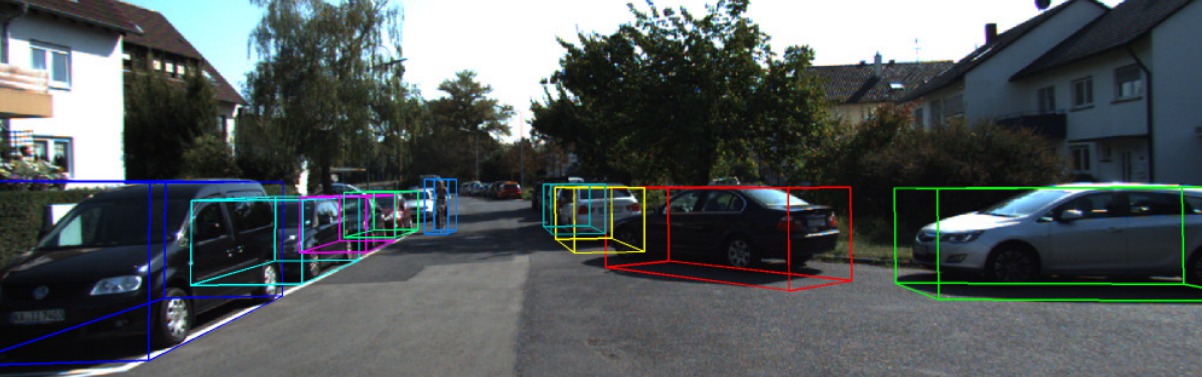 |
| Ejemplo de segmentación de elementos del entorno (fuente: [1]) |
Por eso quiero traeros a todos los interesados un genial trabajo que será presentado en junio en el CVPR 2012. Se trata de una iniciativa conjunta del Karlsruhe Institute of Technologyy el instituto tecnológico de Toyota en Chicago, y consiste en un dataset, unos conjuntos de datos recogidos usando un coche modificado con sensores muy caros y que ponen a disposición de cualquier investigador interesado para realizar comparaciones entre distintos métodos.
 |
| El coche modificado con sensores del grupo cvlibs (fuente) |
Antes de describir para qué sirve todo esto, recomiendo ver el vídeo que han creado:
- Cálculo de odometría estéreo: estimar la posición del coche sólo «viendo» cómo se mueven las cosas a tu alrededor, una etapa fundamental y cuya robustez debe ser crítica si queremos que algún día los coches anden sólos.
- Flujo óptico.
- Segmentación: Distinguir qué cosas de las que ves son otros coches, suelo y, muy importante, ¡peatones!.
- Construcción autómatica de mapas del entorno (SLAM): no podemos asumir que siempre tendremos un mapa actualizado de cada ciudad del mundo. Los coches deben aprender a partir de lo que ven. El dataset contiene ground-truth a partir de GPS-RTK y sistemas inerciales para comparación de los distintos métodos de SLAM.
En su trabajo, los autores comparan su dataset con otros existentes, incluyendo el que nuestro grupo publicó de la ciudad de Málaga [2], y que era el dataset con ground-truth más largo (en kilómetros) hasta la fecha.
Artículos técnicos:
- [1] Andreas Geiger and Philip Lenz and Raquel Urtasun, «Are we ready for Autonomous Driving? The KITTI Vision Benchmark Suite«. Computer Vision and Pattern Recognition (CVPR), 2012 – PDF
- [2] «A Collection of Outdoor Robotic Datasets with centimeter-accuracy Ground Truth», 2009. (web)
