Aprender de mecánica y autovectores rompiendo tizas

Esta semana doy mis últimas clases de Elasticidad (Mecánica de medios continuos) y muy probablemente no vuelva a impartirla nunca, así que ¿qué mejor forma de despedirme que contando un «experimento» del tema por aquí?
La tiza (Mex. gis) es un material frágil por el tipo de fracturas que presenta. El nombre de «frágil» no tiene nada que ver con que sea fácil de romper, ya que por ejemplo el hormigón también se considera un material frágil. Se definen así en contraste con los materiales dúctiles, que en lugar de romperse de forma abrupta se «estiran» considerablemente antes. Por ejemplo, una fina barra de aluminio es dúctil, ya que si tiramos de ella (¡muy fuerte!) se alargará antes de romperse, mientras que una pieza de hormigón, una tiza o un cristal (todos frágiles) se rompen en cuanto se les obliga a estirarse un poco.
El experimento de hoy es un clásico cuando se habla de torsión, que es el nombre técnico que se le da a un tipo de acciones y deformaciones sobre un cuerpo, por ejemplo, las que sufre un eje que transmita una rotación o el eje de un destornillador al apretar un tornillo.
Primero veamos el experimento y luego ya hacemos cuentas. Lo que voy a hacer es intentar torsionar (que no extorsionar) una tiza entre las dos manos, girando en direcciones opuestas por cada extremo:

¿Qué pasará? Está claro que si aprieto mucho la tiza acabará partiéndose, no hace falta ser un genio para adivinarlo, ¿verdad?
Pero atención al detalle: el plano de la fractura hace exactamente 45 grados con el eje. No es casualidad, esto ocurrirá siempre. Es algo tan general que ocurre incluso en algunas fracturas de huesos, aunque no pongo imágenes porque es más desagradable…
 |
| Rotura final por torsión: se aprecia claramente el ángulo de 45º del plano de fractura. |
¿Por qué 45 grados exactos? ¿Por qué no 90º o 30º? ¿Por qué no cualquiera al azar, dependiendo de las irregularidades del material? Existe una demostración físico/matemática muy elegante, así que vamos a verla.
Nos vamos a preguntar por cómo se distribuye, a lo largo de la tiza, las fuerzas que se hacen en los extremos. Nos interesa saber qué ocurre en cada punto del cuerpo sólido:

¿Cuántas «fuerzas» tenemos que tener en cuenta para describir cada punto infinitesimalmente pequeño? Para resolver esto, planteamos un minúsculo cubo (llamado paralelepípedo elemental) y vemos todas las fuerzas que pueden actuar sobre sus caras:
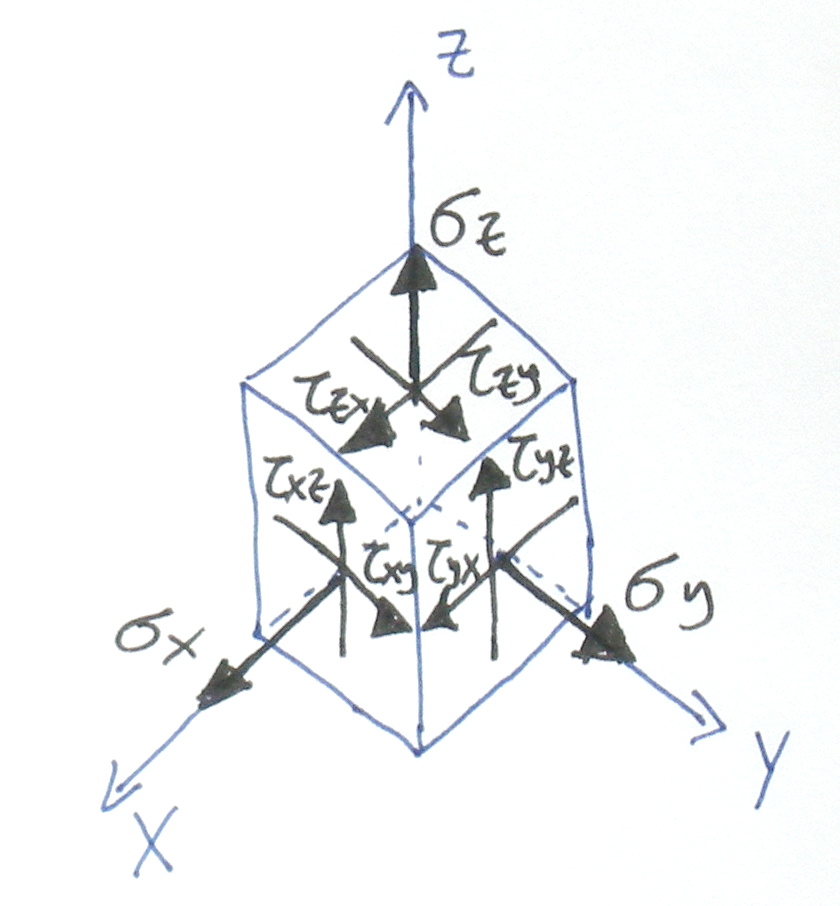
Ahí se ven las 9 fuerzas que actúan sobre las tres caras «visibles», las que nos dan la cara desde el punto de vista del dibujo. Sobre las otras tres caras se puede demostrar que tienen que existir exactamente las mismas fuerzas pero en sentidos contrarios para que el punto esté en equilibrio.
Hay que tener en cuenta que aunque dibujemos un cubo, estamos hablando siempre de un punto infinitesimalmente pequeño. Entonces, y siendo estrictos, las «fuerzas» que aparecen en cada cara no pueden ser fuerzas, sino tensiones, que podéis imaginar como si fueran presiones: fuerzas por unidad de área (eso para los que lean esto como hobby, ¡a los ingenieros que no se les ocurra llamar presiones a las tensiones en un examen aunque tengan las mismas unidades!).
Como sería muy engorroso andar dibujando ese cubo en cualquier cálculo, los físicos encontraron una forma muy conveniente y compacta de escribir esas tensiones, en lo que se llama el tensor de tensiones (el mismo nombre de tensor da idea de que su origen está ligado precisamente a esta aplicación que vemos hoy).
A pesar del nombre tan feo, un tensor del tipo que nos importa no es más que una matriz de 3 filas por 3 columnas, representando los 9 valores de tensiones:
\( \mathbf{\sigma} = \left[ \begin{array}{ccc} \sigma_x & \tau_{xy} & \tau_{xz} \\ \tau_{xy} & \sigma_y & \tau_{yz} \\ \tau_{xz} & \tau_{yz} & \sigma_z \end{array} \right] \)
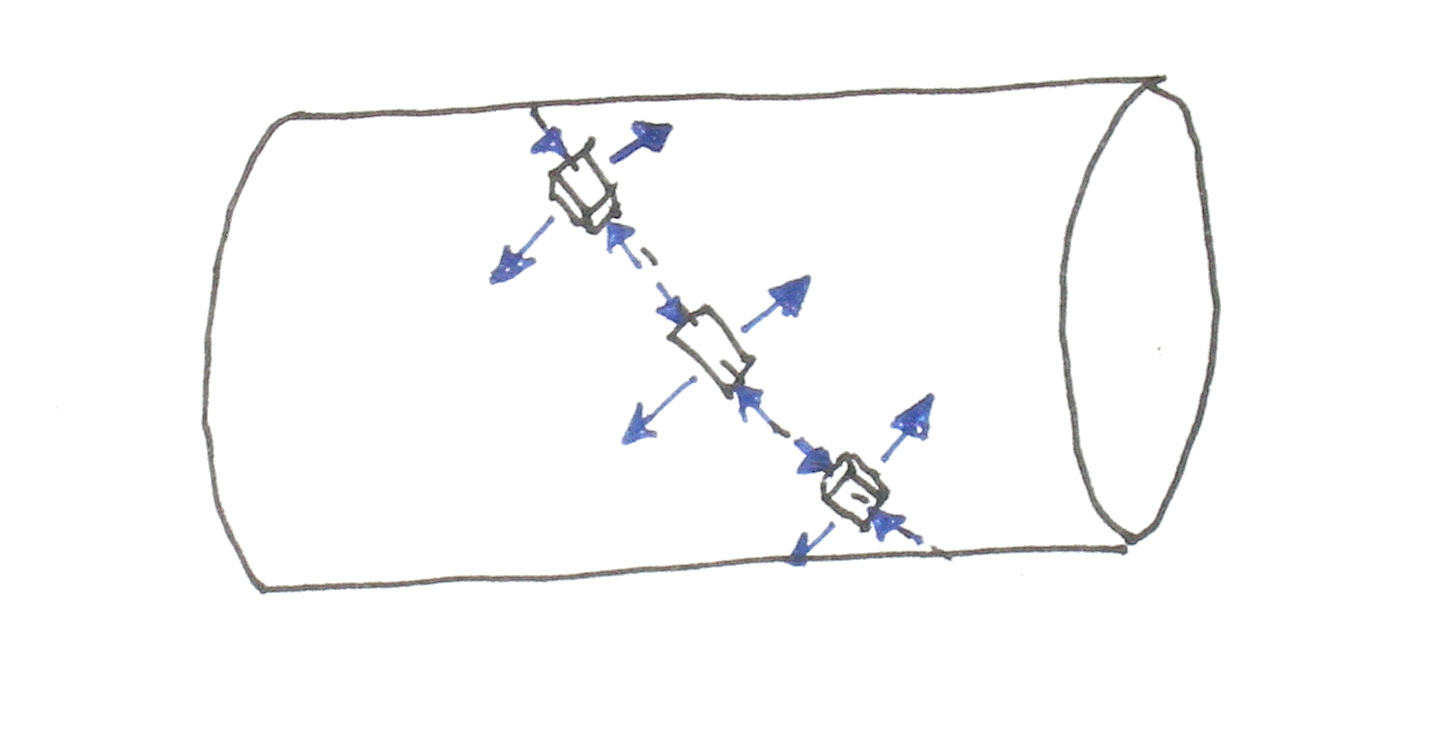
Si ahora buscamos el valor de estas tensiones para el caso de la tiza, se puede ver intuitivamente que para cada punto del sólido aparecerán únicamente tensiones en la dirección que muestra el dibujo:

Es intuitivo pensar que existan las tensiones en la dirección perpendicular al eje de la tiza, hacia arriba y abajo, ya que son las que conforman la «fuerza» en el sentido de la torsión. Las otras dos tensiones, (hacia la derecha e izquierda) tienen el mismo valor y son automáticamente introducidas para compensar las primeras y que cada cubo esté en equilibrio. Sólo las he dibujado en la superficie pero también existen en el interior, aunque su valor va decreciendo hasta llegar a ser nulas justo en el eje central, que no se entera de nada.
Fijándonos en un punto (paralelepípedo elemental) de la superficie, podemos escribir su tensor sabiendo que las tensiones son todas cero excepto en esas dos caras, a cuyo valor llamaremos τ:
\( \mathbf{\sigma} = \left[ \begin{array}{ccc}0 & \tau & 0 \\ \tau & 0 & 0 \\ 0 & 0 & 0 \end{array} \right] \)No es inmediato entender qué quieren decir esas tensiones, ni si existen direcciones en las que «tiran más» que en otras. Así que echamos mano de una utilísima herramienta: los autovalores y autovectores de una matriz.
Se puede demostrar que cualquier matriz simétrica (como nuestro tensor de tensiones) se podrá siempre ver desde «otro punto de vista», tal que sólo aparezcan valores en su diagonal. En nuestro caso, el «punto de vista» se corresponde con girar en tres dimensiones las caras del paralelepípedo. Es decir: las mismas tensiones de un punto infinitesimal se pueden ver con respecto a un cubo girado arbitrariamente, y existe una orientación concreta en la que el tensor será todo ceros excepto (como mucho) en su diagonal. Los autovalores serán los tres valores de la diagonal, y los autovectores nos dirán las direcciones de los tres ejes del nuevo sistema de coordenadas en que hemos de «mirar» el cubo.
La ventaja de hacer todo esto es que los números de la diagonal tienen un sentido físico más intuitivo: es lo que se «estira» o se «comprime» en las direcciones perpendiculares a las seis caras del cubo. Son los valores σx, σy y σz del paralelepípedo:
Los dos primeros autovectores de nuestro tensor (el que puse arriba) forman 45º exactos con los ejes originales (el tercero corresponde con la dirección radial y se mantiene invariable) y que los autovalores son τ y -τ (el tercero, correspondiente a la dirección radial, es cero). Cómo es muy fácil demostrarlo, lo dejo como ejercicio al lector que le interese.
Entonces, tenemos:
\( \mathbf{\sigma} = \left[ \begin{array}{ccc}0 & \tau & 0 \\ \tau & 0 & 0 \\ 0 & 0 & 0 \end{array} \right] \quad \rightarrow \quad \mathbf{\sigma}’ = \left[ \begin{array}{ccc} \tau & 0 & 0 \\ 0 & -\tau & 0 \\ 0 & 0 & 0 \end{array} \right] \) |
| Izquierda: El estado tensional original. Derecha: Las mismas tensiones, pero vistas para un cubo girado 45º. Aquí sólo existen tensiones normales a las caras (son las tensiones principales). |
Donde σI es el primer autovalor (positivo, que significa que estiramos el cubo) y σIII el segundo autovalor (negativo, que significa que comprimimos el cubo).
Ya que esto ocurre a todo lo largo del cuerpo de la tiza, al final tenemos que podemos encontrar infinitas líneas a 45º donde las tensiones tienden a estirar, o separar, la tiza en dos mitades: